Lancement du projet
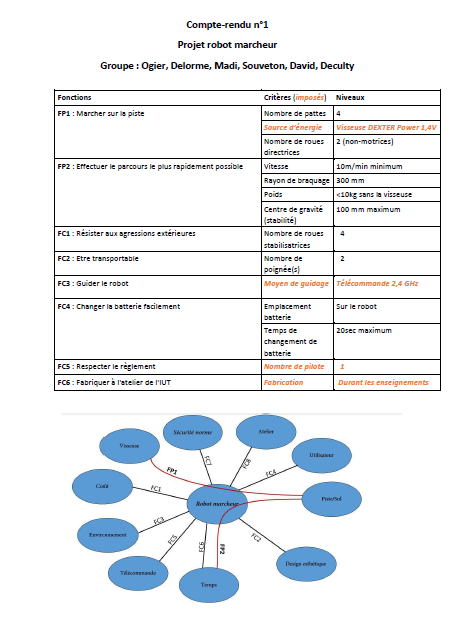
Nous avons, dès la première séance, commencé à chercher les fonctions auxquelles doit répondre notre robot. Ces fonctions sont répertoriées dans un tableau ainsi que dans un diagramme à pieuvre pour montrer les liens qu'elles ont entre elles.
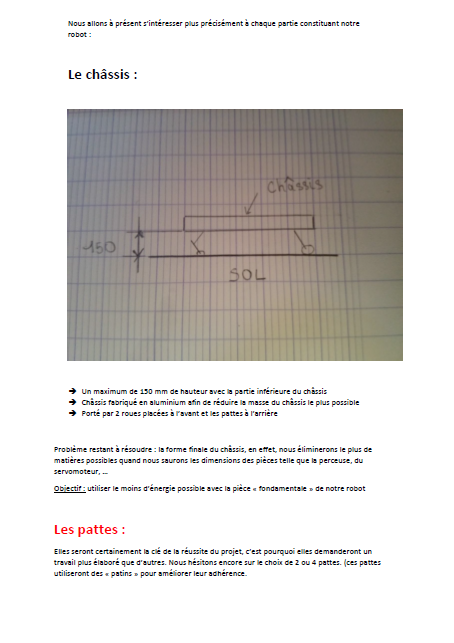
Nous avons ensuite cherché des solutions techniques qui répondent aux fonctions trouvées, en lien avec les sous-ensembles constituant notre robot :
- Les pattes
- Visseuse (emplacement)
- Deux roues stabilisatrice et directrice
- Le servomoteur (emplacement) / système de direction
- Les points d’ancrage du char
- Protection avant
Nous avons donc une sorte "d'ébauche" de notre robot susceptible de bouger avec les aléas de conception et de fabrication.